

2-) Outputs
https://youtu.be/LPgAOTHfp50?list=PLN1j_JuvrwOJYA5TVu8JF2AL8OXq1tAB_
Output Blocks:
You can reach input blocks from the input section of the blockly website as you can see in the following picture.
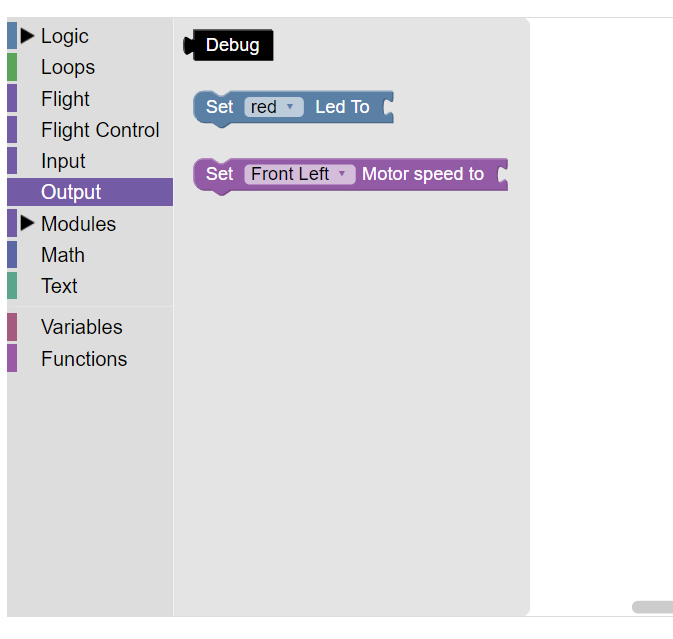
1-) Debug Block
Thanks to this block, we can read ESPcopter's whole current condition like battery voltage or which sensor is connected. Debug block is returning Strign. For this reason, you need to use it with a print block.

2-) Set Red / Green / Blue Led Block
Thanks to this block, we can turn on or turn off the board led color. This block has an input port. We can connect the boolean(True or False) block to this input.

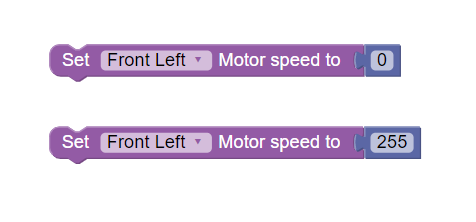
3-) Set Motor Speed Block
Thanks to this block, we can set ESPcopter motor speed separately. This block has an input port. We can connect the integer block to this input. The range should be 0 and 255. 255 is the max speed.
Note: Be careful when you are using this block. The drone may take off if you increase motor speed too much. Please slightly increase the motor speed.
1-) Inputs
https://youtu.be/0fU2GMVVK3Y?list=PLN1j_JuvrwOJYA5TVu8JF2AL8OXq1tAB_
Input Blocks:
You can reach input blocks from the input section of the blockly website as you can see in the following picture.

1-) Read Battery Voltage:

This block is basically reading battery voltage.
Example Projects:
- Print Battery Voltage to screen

- Print 10 times battery voltage to the screen

- Exercise: Convert drone battery voltage to percentage and print to screen
(Hint: output = ((voltage - battery_min) / (battery_max - battery_min)) * 100;)
2-) Read Accelerometer X Y Z Data:
An accelerometer is a device that measures the vibration, or acceleration of motion of a structure.

3-) Read Gyroscope X Y Z Data:

4-) Read Yaw Degree

5-) Read IMU Temperature
